|
SSAGES
0.1
A MetaDynamics Package
|
|
SSAGES
0.1
A MetaDynamics Package
|
Collective variable on components of the gyration tensor. More...
#include <GyrationTensorCV.h>
Public Member Functions | |
| GyrationTensorCV (const Label &atomids, GyrationTensor component) | |
| Constructor. More... | |
| void | Initialize (const Snapshot &snapshot) override |
| Initialize necessary variables. More... | |
| void | Evaluate (const Snapshot &snapshot) override |
| Evaluate the CV. More... | |
 Public Member Functions inherited from SSAGES::CollectiveVariable Public Member Functions inherited from SSAGES::CollectiveVariable | |
| CollectiveVariable () | |
| Constructor. | |
| double | GetValue () const |
| Get current value of the CV. More... | |
| virtual double | GetMinimumImage (double) const |
| Returns the minimum image of a CV based on the input location. More... | |
| virtual double | GetPeriodicValue (double location) const |
| Apply periodic boundaries to a given value. More... | |
| const std::vector< Vector3 > & | GetGradient () const |
| Get current gradient of the CV. More... | |
| const Matrix3 & | GetBoxGradient () const |
| Get gradient contribution to box. | |
| const std::array< double, 2 > & | GetBoundaries () |
| Get CV boundaries. More... | |
| virtual double | GetDifference (double location) const |
Static Public Member Functions | |
| static GyrationTensorCV * | Build (const Json::Value &json, const std::string &path) |
| Static Public Member Functions inherited from SSAGES::CollectiveVariable | |
| static CollectiveVariable * | BuildCV (const Json::Value &json, const std::string &path) |
| Set up collective variable. More... | |
Private Attributes | |
| Label | atomids_ |
| IDs of the atoms used for calculation. | |
| GyrationTensor | component_ |
| Component of gyration tensor to compute. | |
Additional Inherited Members | |
| Protected Attributes inherited from SSAGES::CollectiveVariable | |
| std::vector< Vector3 > | grad_ |
| Gradient vector dCv/dxi. | |
| Matrix3 | boxgrad_ |
| Gradient w.r.t box vectors dCv/dHij. | |
| double | val_ |
| Current value of CV. | |
| std::array< double, 2 > | bounds_ |
| Bounds on CV. | |
Collective variable on components of the gyration tensor.
Collective variable on components of gyration tensor. Depending on the user selection, this will specify a principal moment, radius of gyration, or another shape descriptor.
Definition at line 51 of file GyrationTensorCV.h.
|
inline |
Constructor.
| atomids | IDs of the atoms defining gyration tensor. |
| component | Specification of component to compute. |
Construct a GyrationTensorCV.
Definition at line 66 of file GyrationTensorCV.h.
|
inlineoverride |
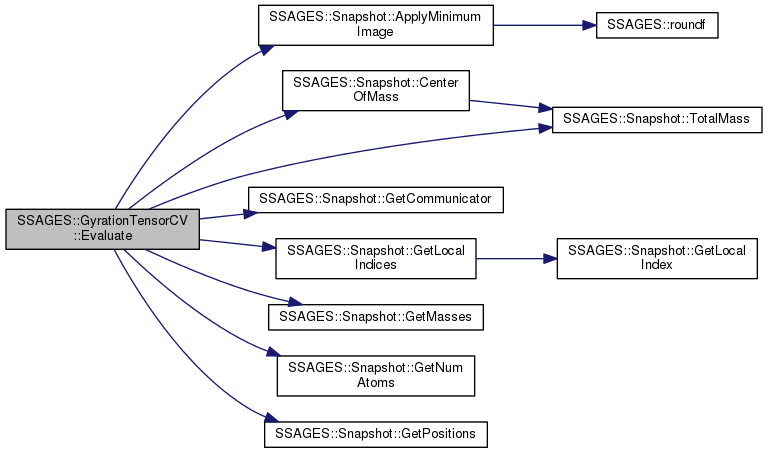
Evaluate the CV.
| snapshot | Current simulation snapshot. |
Definition at line 104 of file GyrationTensorCV.h.
References SSAGES::Snapshot::ApplyMinimumImage(), atomids_, SSAGES::Snapshot::CenterOfMass(), component_, SSAGES::Snapshot::GetCommunicator(), SSAGES::Snapshot::GetLocalIndices(), SSAGES::Snapshot::GetMasses(), SSAGES::Snapshot::GetNumAtoms(), SSAGES::Snapshot::GetPositions(), SSAGES::CollectiveVariable::grad_, SSAGES::Snapshot::TotalMass(), and SSAGES::CollectiveVariable::val_.
|
inlineoverride |
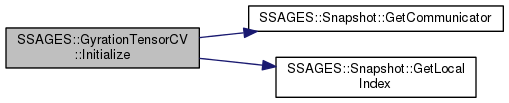
Initialize necessary variables.
| snapshot | Current simulation snapshot. |
Definition at line 75 of file GyrationTensorCV.h.
References atomids_, SSAGES::Snapshot::GetCommunicator(), and SSAGES::Snapshot::GetLocalIndex().
 1.8.7
1.8.7

